2024-02-06 Share: PID 調參指南
- This article describes the PID tuning and related information


Link
Local Backup
我們為什麼要調機?
- 四軸機的飛行是依照 PID 迴路的控制來運行的。像是當我們要飛機做 roll / flip翻滾動作時,會下達命令,通常是改變設定點(Setpoint),也可以簡單的理解爲變動了搖桿位置(Stick),這時 PID 迴路會對根據位置命令做出反應,依照我們的要求調整機子的姿態動作。調整 PID 的終極目標是希望機子能以最快的速度對我們的翻滾命令作出反應,同時避免過衝(Overshooting)及震蕩抖動(Oscillating)。其實這個調整的原則,可以適用在各種等級的四軸飛機上,使用任何飛控韌體,都有包含 PID 迴路。這份指南和影片主要介紹 Betaflight,因為它是目前賽道與花式飛行(freestyle)最廣泛使用的系統。 但是同樣的原理也適用於:FalcoX,KISS,iNAV,Cleanflight,EmuFlight,Baseflight 等。因爲它們都使用 PID 控制器!

- 以上圖爲例,我們在時間開始的時候下令由 0 改變到 110%。此時 PID 迴路開始對命令做出反應,將機器(在本例中為四軸飛機)移動到新的值。 姿態命令的藍綠色線(Command)代表我們的搖桿下令的位置。 紅線,綠線和黃線是基於不同PID值調節出來之不同陀螺儀(也就是飛機姿態)的響應。
- 我們的目標是要調出(在PID迴路中測出來的陀螺儀量測值)在臨界阻尼狀態(Critically damped)下的綠色反應曲線。
- 調整四軸機的過程很簡單,它涉及以下4個關鍵步驟。 只需要使用一到兩顆電池。調整的方式可以透過目視飛行(Line-of-Sight,LOS),使用FPV眼鏡飛行或利用黑盒子(Blackbox)來完成。 我通常使用黑盒子因為它有助於了解正在發生的事情(并能解釋原因),而且它在調整時提供了最高的精確度,但不是一定需要黑盒子來調整飛機。
- 下面將更詳細地概述這些步驟。 第1到第3步驟對於良好的飛行性能至關重要,包括:
- 降低洗槳(Propwash)狀況
- 良好的抗風的能力
- 飛行中沒有抖動或振盪
- 操控跟手度(能直接感受到)
- 急加油門時的沒有機子飄動的現象(throbbles)

我們怎麼調整?
- 步驟1 – Filters 調適濾波器: 如果飛行時,陀螺儀信號不斷產生抖動雜訊(有人稱為噪聲),PID控制器將無法完美的工作。
- 步驟2 – P/D Balance 調適P/D平衡:我們要找出每台飛機獨有的 P/D平衡比。
- 步驟3 – PD Gain 調適PD增益:提高 PID 增益能加快馬達響應(馬達力量變化)的速度。
- 步驟4 – FeedForward (FF) 調適前饋值:增加第四個控制項以減少標準PID控制器中的内在延遲。
步驟1 –調適濾波器:
- a) 設定機子時,先啓動新的RPM濾波器。 詳細的設置步驟請參閱“Betaflight 4.1 濾波器設置- 前瞻的 RPM 陷波濾波器!(Betaflight 4.1 Filter Setup -- RPM Notches are the future!)”。 RPM濾波器有兩個優點(對於任何四軸飛機):
- RPM濾波器可以更精確的跟蹤與抑制馬達產生的峰值噪聲。
- 它更能讓動態濾波器(Dynamic Notch)專心尋找並跟追蹤由機架共振或其他問題產生的噪聲(例如:天線振動,機架裂縫等)並將其濾除。
設置好RPM濾波器後(包括動態濾波搭配調整),請進入步驟 b)
- b) 試著將濾波器頁面(Filter tab)上方的兩個低通濾波設定滑塊(lowpass filter slider)同步往上升,嘗試達到1.5或2.0。 與著其他設定(影片中的說明)將濾波器設定在合理的平衡位置(避免太低與不足)。 根據不同的情況,能調到最高的數值會有所不同! 因此,調適時每次只調一到兩格,然後嘗試以全油門及激烈飛行動作來測試。

圖1. 濾波設定頁中 Gyro 和 D-term 低通濾波設定滑塊- 測試過程中必須注意檢查馬達溫度。在機子怠速及飛行中,注意馬達是否發生額外的噪聲(摩擦聲)。測試時儘可能做急彎及其他會造成洗槳的飛行動作。留意升高濾波設定時,狀況是變好還是變壞。如果變好,可以繼續升高。如果變差,就停止測試,並降回前次的設定。有時升高濾波設定值之後,雖然馬達溫度沒有升高,飛行效能卻變差了(這是因爲 D值的雜訊/訊號比太高(noise-to-signal ratio)。我們可以由洗槳現象變好或變壞依照感覺判斷來決定升高滑塊的時機。
- 其他做法:
- 依照下圖設定黑盒子記錄器(Blackbox),記錄一段測試飛行的資料。測試飛行要包含全油門及激烈飛行。 飛行過程注意避免撞擊物品,而且在起飛和降落時要避免彈跳(這不是很重要,但是如果未避免或去除,可能會導致分析工具誤判)。請查看陀螺儀信號和 D-term 信號的頻譜。
- 調適的目標是要確認頻譜圖中的所有噪聲峰在濾波之後都被完全消除,並且D-term信號在 100hz 和 200hz 之間沒有過多的噪聲。

圖2. 黑盒子設定頁面的建議設定
- 關於如何用黑盒子紀錄試飛狀況並調整濾波器請參考以下影片:
- 1, 獲取噪音紀錄的方式:
- 2, 如何調出你自己的濾波參數:
- 關於濾波的基礎知識或更深入的了解濾波器的工作原理,請參考濾波基礎說明(Filter Fundamentals)系列影片:
- 通常,調適的目標是使用陀螺儀濾波器(Gyro filters)來消除馬達造成的高頻振動“噪聲”。並且使用D-term濾波(D-term filters)來緩和被翻倍的噪聲(噪聲翻倍是 D-term 自然的副作用)。這個調整的目的在於高頻噪聲(100hz 以上)會使D-term變得失控,從而導致順飛時的抖動或是馬達過熱。


步驟2 –調整P/D Balance 平衡:
- 將下面的命令複製並貼到 BetaFlight 的 CLI 命令列。這將關閉所有 BetaFlight 高級 PID 控制功能,恢復到 PID 基本設定(這些額外的高級設定會增强 PID 控制器,使其超越理論限制)。然後進行測試飛行,飛行中儘量包含多次翻滾(Flip)及側滾(Roll)(目視飛行或 FPV 飛行均可),反復激烈的調整搖桿,然後不斷增加P值,直到看到反彈(bounce-back)狀況發生。對於目視飛行或FPV飛行,您需要仔細聽與看(現象發生得很快)。然而,在黑盒子紀錄檔(BBL)中很容易觀察。我們可以根據步驟 1 調整濾波器後的基底噪音來設定 pitch 與 roll 的 D 值(pitch 和 roll 的 D 值可以用一樣的設定)。這個做法是很主觀,完全取決於你可以容忍 PID sum 裏的 D-term 信號噪聲有多高。對於使用 4S 電池的 5 吋機,一般建議 D 值是 30 多或 40多。對於使用 6S 電池的 5 吋機,D 值可能要下調到 20 多或 30 多。對於無刷小四軸(whoop)來說,大概在 60 多或 70 多。P值則是越高越好,調高直到出現搖桿快速動作後出現過衝現象 (Overshooting),然後再稍微調低,確認在最佳的臨界阻尼狀態(Critically damped)飛行(見圖7)。同樣的,最簡單的方法是目視觀察或 FPV 飛行時的細節。如果要精確的看到飛行姿態的變化,就要查看黑盒子紀錄檔。

圖3. PID 設定頁面中的 PD balance 滑塊- 這一步驟的影片教學以及黑盒子中要看哪些資料,請參考:
- 關於 CLI 指令,請複製貼上後,打 SAVE 保存。
#PID Gains Settings set d_min_pitch = 0 set d_min_roll = 0 set f_pitch = 0 set f_roll = 0 set f_yaw = 0 #PID Controller Settings set pidsum_limit = 1000 set pidsum_limit_yaw = 1000 set feedforward_transition = 0 set abs_control_gain = 0 set use_integrated_yaw = OFF set iterm_relax_cutoff = 10 save
- 當找到合適的 P 與 D 比例(平衡)後,您可以重新叫出 PID 調節滑塊並調整Master Multiplier 與 PD Balance 項目,以接近您手動設置的數字。 並非所有的四軸飛機都能使用 PID 滑塊來調適。由於Betaflight 的滑塊範圍是針對使用 6S 電池的 5 吋機而設計的,如果您要調小四軸(Whoop),牙籤機(Toothpick),或是 10 吋機,滑塊可能因爲範圍不足而無法滿足調適需求。
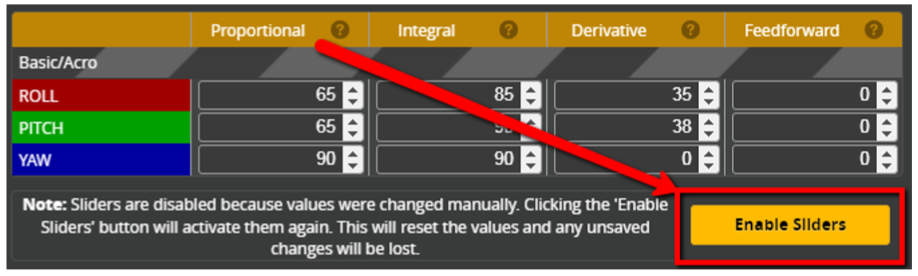
圖4. 開啓 PID 設定頁中打開調整滑塊- 在進行翻轉(flips),翻滾(rolls)和半速率移動時(就像影片中的例子),我們對飛機輸入了一個階梯函數命令,使得 PID 控制器產生階梯響應(Stepped Response)使機子的姿態發生變化。 這就是如何調適 PID 控制器的手段。圖5列出了 PID 控制器中,改變各項設定對飛機性能的影響。另外,圖7説明了在臨界阻尼(Critically damped)狀態下的階梯響應(Stepped Reponses)曲綫。
- 對階梯響應(Stepped Reponses)曲線調整更深入了解:
- 下面的圖 5 總結了在調整 PID 設定時,如果只調高 P/I/D 其中一項,另外兩項保持不變,會產生什麼效果。 例如,查看表格的第一行,如果增加 P 值,而 I值與 D 值保持不變,系統時會:
- 降低反應時間(Rasing Time / Response Time)(四軸機移動的速度與搖桿命令更同步)
- 增加過衝現象(Overshoot)狀況(如果數值過大);
- 小幅度增加了穩定時間(Settling time)(如果數值過大);
- 穩態誤差降低(Steady-State error)(最佳時);
- 穩定性(Stability)變差(如果數值過大)。
- 關鍵是要在 P 和 D 項之間取得適當的平衡值,使得階梯響應(Stepped Reponses)曲綫達到臨界阻尼(Critically damped)的狀態(請參見圖7)。 前面步驟 2 中的 CLI 命令可幫助我們隔離 P與D的互動值,讓我們可以找到 P/I/D 的完美平衡!

- 當 D_min 開啟時,其值就是 PID 控制器中的D 值。只有在激烈動作下才會把 D 值提升到 D_max 值。詳細說明請參考步驟 4 的“前饋值造成的過衝現象 (FF induced overshoot)”。
- 接收訊號不穩定導致的影響(Crossfire, R9 與所有 Frsky 接收都有可能發生)
- 圖5:PID改變的影響 (來源:http://eprints.gla.ac.uk/3815/1/IEEE_CS_PID_01580152.pdf)
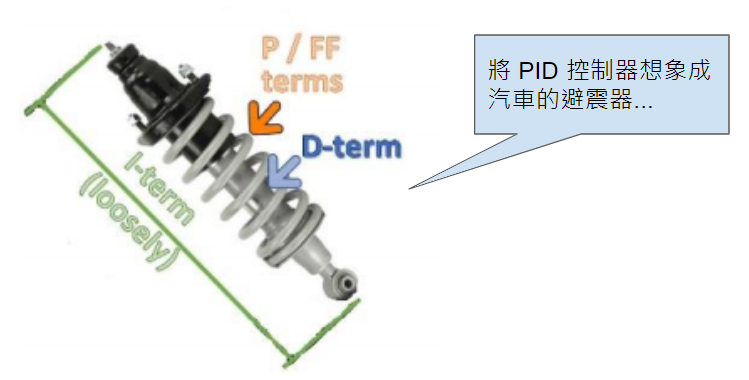
圖6:將 PID 控制器想象成汽車避震器時各項參數的意義- 圖7 概述了以上調整項目的意義。 當我們進行翻滾或側滾時,我們改變了 ”姿態命令“(我們稱為四軸飛機的姿態設定點(Setpoint),也可視為搖桿位置指令),然後 PID 控制器會對這個動作做出反應,我們就可以觀察控制器如何處理這個姿態命令的改變(也就是對階梯函數的反應)。在調適的過程中,我們必須兼顧全速率和半速率運動,觀察控制器的反應,來優化調適結果。
- 前文的 CLI 指令會幫我們避免 P 與 D 值互相影響(關閉前饋值(FF)及去除 I-term 的作用),讓我們能單獨調整 P 值來決定最佳的 P/D 平衡比例,尋找臨界阻尼狀態下的 PID 反應。也就是不產生過衝的最高 P/D 平衡值。
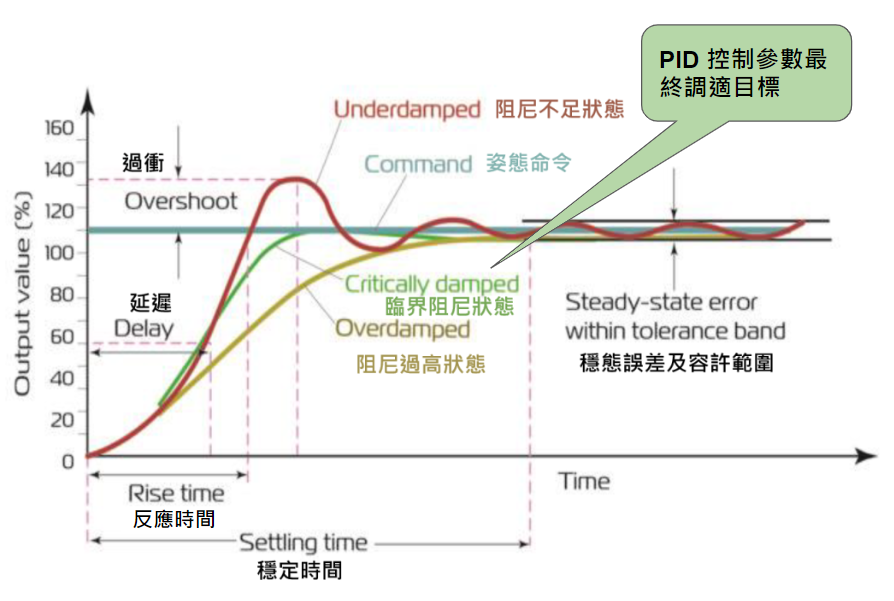
圖7 階梯函數輸入反應圖(Step Response diagram)- 在這個舉例中,姿態命令在時間開始時從 0 改到 110%,然後 PID 迴路開始反應來調整四軸飛機到目標姿態。下姿態命令的是我們遙控器上的搖桿,而紅線,綠線,黃線代表在不同 PID 設定值下的陀螺儀反應(飛機位置變化)。調適的目標就是把飛機的姿態反應調到“臨界阻尼狀態”下這條綠線(反饋給 PID 迴路的陀螺儀測量值)。





步驟3 – 調整PD Gain:
- 當機子的 P/D Balance 平衡值決定之後,即使我們增加增益參數或是加入高級 PID 控制項(例如 FF,Dmin,等等),也絕對不要改變這個平衡值。PID 調整滑塊的設計時考慮了這些限制,所以能使我們在調適的時候更方便快速。在這個步驟裡,我們同步增加 P 值和 D 值,來進一步抑制洗槳及讓機子姿態變化與搖桿動作(Setpoint)配合更佳。

圖8 PID 設定頁面中的 P and D Gain 設定滑塊- 在上面的範例中,P/D Balance 比例為 1.71 。因此,如果 D 值從 35 增加到 40,你必須將 P 值從 60 增加到68 (公式:40 新的 D-gain x 1.71 = 68 新的 P-gain)。如果你用 “P and D Gain” 設定滑塊來調整設定,會自動根據 P/D balance 比例自動計算。
- 試飛的時候,要嘗試常發生洗槳的飛行動作(180 回轉或 split-S 動作),然後提升 P and D Gain 設定來減低洗槳現象。隨著您不斷提高 P 和 D 值,當 D 值過高時馬達會開始有發熱的現象或在平穩前行時發生抖動(通常在使用 4S 電池的 5 吋飛機上調到 40 到 60 或在使用 6S 電池的 5 吋飛機上調到 30 到 40 會發生這些現象)。另外,把設定調高到某個值後,洗槳狀況不再變的更好,這個值稱為“馬達飽和(motor saturation)”狀態,這是由於達到馬達與槳葉機構的極限。你可以在飛行中感到狀況已經沒辦法變的更好,也可以透過黑盒子記錄的 Motor Command 軌跡來確認(飛行過程中會有 1 到 2 ms 的時間處理達到 100%)。這就是針對此台飛機之機構狀況而調整出來的最佳設定值。如果你還要更進一步改善洗槳狀況,那就只能從硬體開始下手了。最經濟的方法是找到最佳(最輕)的葉片來匹配您的馬達(槳不能過輕或過重)來達到你所需要的響應曲線/感覺,以及你希望的滯空時間。所以如果你完成所有的調適步驟,但是仍然無法接受剩餘的洗槳的現象,那就是機子的硬體極限,不是軟體調適能解決了。

步驟4 –調整前饋值 FeedForward (FF):
- 第四步驟對於飛手需要更俐落的搖桿動作(例如賽道飛手)比較重要。相對花式飛行(Freestyle)的飛手而言,他們應該比較喜歡 FF 設成 0 產生的滑順感。

圖9 PID 設定頁中的 Stick Response Gain 設定滑塊(FF 設定滑塊)- 當你調整 P 和 D 的强度來避免洗槳時如果達到電機飽和,你就需要 BetaFlight 中 PID 控制器的高級設定來做進一步的調適。其中,前饋值(FeedForward, FF)的作用是在機子接受到快速的搖桿命令來做急彎時,除了 P-term 的力量外,再加强轉彎力度。FF-term 的計算是根據搖桿移動速率的快慢,這就像是你在電腦上移動滑鼠的加速感。FF 的作用和 D 增益類似,不過 FF 是根據搖桿位置變化速率來計算(D-gain 是根據陀螺儀變化速率計算)。另外,FF 會增加額外的推力(D-term 是抑制推力)。 調整FF主要看你的感覺,因此,請根據自己的需要的感覺增加(或不增加)數值。
- 不用擔心 FF 值設定過高 (超過300)! 以我的經驗來看,使用 4S電池的 5 吋機(重量約650g)可能需要FF值調到 300,才能在速率設定在 1020 deg/sec 的高旋轉狀況下,讓陀螺儀(機子的飛行姿態)完全追上搖桿的設定點(Setpoint)。
- FF引起的過衝現象:隨著 FF 值設定增加,飛機可能會開始出現一些輕微的過衝現象。在 BF 4.1 版以後,這個問題比以前少了很多。這是因為 BF 添加了一些功能,當系統觀察到姿態接近設定目標時,會自動關掉 FF 產生的額外推力。但如果你還是有遇到過衝狀況,可以嘗試開啟 D_min,加强 FF 的推力來消除過衝現象。

圖10 啓動 D_min 設定- 當 D_min 開啟後,在 PID 設定視窗可以發現多一個 D_min 的欄位(參考圖10)。這時,D-min 會在一般飛行狀態下取代正常的 D 值!四軸機在大部分的飛行的時間內會使用D-min值來飛行。而原本的 D 值(Derivative)會在激烈操控動作或是發生洗槳狀況時恢復使用(又稱爲 D-max 值)。
- 一般來説,要解決 FF 過衝的典型 D-max 值大約等於您的 P 值。 如果你使用滑塊調整時,它們會自動保持適當的比例。
- 更深入的了解 D-min 值:
- 當你啟動 D-min 後,飛機會把 D-min 值當成 D 值來飛。如果飛機遇到激烈操控或是發生洗槳狀況時,為了對抗並消除晃動與誤差,D值會自動提高到D-max 值(就是設定表裏 Derivative 欄位中的數值)。你可以提高 D-min 增益(D Min Gain,在圖 10 中的右下角,顯示是27)來增加對洗槳狀況偵測的敏感度。預設值是 27,但你可以增加到 50,這樣會加快 D-min 遇到狀況時提昇 D 值的速度,並在此高D值下保持更長久些。而且這也會增加搖桿移動時的反應時間,以便讓D值因應激烈的操控動作迅速提昇。
- D-min 詳細說明與在發生噪音的飛機上能減少濾波的應用: https://youtu.be/n8iwIcJSuWs
- D-min做到 D_Boost以獲得高性能調參(我們想要的): https://youtu.be/RtsQwGVTHg4
- 當你都完成以上調參後,你的機子在既有硬體限制下,陀螺儀(姿態)應該能完全追上搖桿的動作(能直接能感受操控飛行),也能克服洗槳,風,晃動,浮動等等狀況。


步驟5 –轉向的調整 Yaw Tuning:
- 轉向(yaw)對於搖桿命令(Setpoint)的反應,相較於側滾(roll)與翻滾(pitch)是相當緩慢的。對 yaw 最大的影響來自於馬達/葉片的慣量移位(兩個馬達加速,兩個馬達減速)。因此,轉向基本上很難有過衝的狀況。在 BF 的設定裏,轉向的 D 值預設為 0 以避免 D-term 抵抗 P-gain(但是 D 仍然可以視需要來調整)。為了增加 yaw 的推動力,就像其他軸一樣,可增加 yaw 軸的 P 值。如果你增加 yaw 的 D 值,反而會抵消推力而需要更高的 P 值,這將使得轉向動作的開始時會突然加速。 再來,由於反應太慢,yaw 需要更高的 I 值才能保持其追上 Setpoint 設定值。與步驟 6 中的 I 項調整一樣,最好通過黑盒子記錄來調整 yaw 的設定,並確認當您進行比較激烈的轉向時 yaw 陀螺儀的讀數會跟踪 yaw 軸設定點。 然後將步驟 2 的方式運用到yaw軸參數優化。 通常來説,P 和 I 的設定值相對較高(P = 80~90 , I 值保留預設值)。
- 有關此步驟的影片請參考:PID Tuning Principles: Step #5 - Yaw Axis Tuning
- 請注意,在BF 4.0 版以後,Yaw 的I-gain 在軟體中已經乘以 2.5 倍,來提高 Yaw 方向有更好的 I 值響應。在BF的早期版本(3.5及更早的版本)中,Yaw 的 I 值通常都太低了。
- BF 4.0 中的整合 yaw 功能(Integrated Yaw):如果打開,那麼上面的調整建議就有問題了。 注意在步驟 2 中複製的 CLI 命令,暫時禁用了這個功能,直到有新的yaw調整方式並確認無誤後(使用絕對控制 Absolute Control),再來補充說明並更新這本指南。 如果你想自己搞那就自己去試試吧。 如果不想把事情弄得太複雜,請禁用這個功能(Integrated Yaw)”。
步驟6 –調整 I 值:
- 透過 BF 中新增的 I-Term Relax 功能,你可以把 I 值調的非常高而沒有負面影響。調整 I 值的最佳方法是通過飛行感覺或利用黑盒子記錄。 較高的 I 值將使四軸機在轉彎中更準確地跟上搖桿的設定值 setpoint。 不過這也將使你的飛機進行急速動作時會感到有些僵硬。其實,它不是那麼難調的參數。 所以最好方法是設完所有其他設置後,利用黑盒子的紀錄來檢查飛機在移動/轉彎時能不能跟上。
- 如果陀螺儀的軌跡似乎長時間在設定值的高點或低點運行,説明機子需要更高的 I 值。 如果陀螺儀曲線在設定值上方和下方的非常非常緩慢的震蕩,則說明表示您的 I 值過高(這非常罕見,在大多數情況下需要100以上的 I 值。這種情況發生的幾率可能遠低於發現四葉幸運草或中大樂透!)。 在大多數情況下,機子適合的 I 值接近預設值,而且容許誤差相當大,所以一般很少關注 I 值調整。但若是飛賽道的飛手,就可能會需要更高的 I 值,以便在能更準確的過彎與跟隨賽道飛行。因此賽道機請嘗試將把 I 值提升多一點(多加個 20 或 30)然後看看飛賽道的感覺。如果您喜歡花式飛行 freestyle 的滑順感覺,請嘗試降低 I 值,甚至將 FF設為 0,這樣可拍攝到更柔美的 HD 素材。
名詞定義說明:
- Overshoot 過衝:當你要求飛機改變翻滾,側滾,或是轉向速率,飛機嘗試追上新要求的轉動速率卻超過設定的目標。這個現象也稱為 “bounceback 回彈”,因爲在 FPV 飛行,目視飛行或檢視黑盒子記錄時,如果在快速俯仰或翻滾動作結束時發生過衝現象,飛機就會有回彈動作。因此,回彈是指飛機動作超過設定發生過衝後,必須彈回來到正確的位置。 如上圖 7 所示,過衝是阻尼不足 Underdamped 的狀況,是不好的 PID 調適結果。
- Bounceback 回彈:是四軸飛機在急速翻轉或滾動結束時,發生一個小彈回(抖動)的狀況。 你可以在目視飛行,FPV眼鏡,或黑盒子紀錄上看到。通常是飛機超過設定的 roll 或 flip 的翻滾速率(設定點 setpoint),然後彈回到 setpoint 設定點。 參考圖7,回彈是阻尼不足(Underdamped) 的 PID 控制器,是不好的 PID 調適結果。
- 如果回彈動作快速:
- 如果飛機會超過設定位置然後回彈到目標,這代表你的 P/D Balance 太高了。你需要升高 D 值或降低 P值。
- 如果飛機在到達設定位置之前就停止,然後再到目標位置(這種情況非常罕見),這代表 P/D Balance 太低了(參考圖 7 - 阻尼過高狀態)。這時你需要降低 D 值或是升高 P值。
- 如果回彈動作緩慢:
- 這個現象發生的原因是 I-term 累積導致 I-term 拖行飛機而超過設定點(或提早在到達設定點前停止),然後慢慢向後(或向前)修正到目標位置。然而,前文步驟 2 中的 CLI 命令中,開啓了 “I-Term Relax”的功能並將 cutoff 設定在 10。這樣的設定可以防止 I-term 累積導致 I-term 拖行飛機超過設定點。關於更多 I-term Relax 的説明,請參考 http://youtu.be/QfiGTG5LfCk
- Setpoint 設定點:是你對飛機下達的命令。例如:當你要求飛機做一個急速翻滾,轉速的設定點會從每秒 0 度升高到 Rate 設定頁裏定義的翻滾最高轉速。在飛行過程中,我們會透過遙控器的搖桿位置來要求飛機以設定的 roll,pitch,和 yaw 速率進行動作(另外,也設定了油門大小),然後 PID 迴路就會設法控制飛機的運動來達到設定的轉速。當你有足夠的經驗,你就可以感覺到飛機的運動是否緊密的跟隨你搖桿位置。當然,透過黑盒子記錄來確認要容易多了。
BF中的調整滑塊說明

譯者後記
- 通常PID的調整是給有一定飛行經驗與程度的飛友來調整。初學者建議用原廠設定好的參數飛行就好。因為調整 PID 需要飛行一些特別的飛行動作,初學者不一定能飛的出來。此外調整 PID 最大的用途在於手動飛行,自穩與半自穩狀態下是沒有什麼效果的。
- 最常遇到需要調整 PID 的情況,除了改善洗槳狀況外,有時候感覺飛機飛起來太飄太滑,最簡單的調整就是增加 I 值與 FF 值,這樣能讓飛機更能鎖定你需要行進的方向,不過這樣也會讓飛機飛起來感覺很生硬,比較適合在賽道飛行,若是飛 freestyle, 反而會希望飛機更滑一點,像是轉彎飄移,慣性越樹動作等,所以各有優缺點,因人而異。
- PID 的調整中,D 值相對很重要。我曾經發生過 D 值太高而燒掉馬達的情況,所以在調機的時候,千萬千萬要注意每趟飛完後摸一下馬達熱度,如果馬達是屬於哪種燙手的狀況就一定要降低 D 值,避免燒毀馬達,尤其是在更換葉片種類之後,或是改用更高 S 數的電池,一定要確認一下馬達溫度。(例如翼飛的蜂機,原廠強調:從2s電池改用3s電池,一定要把 D 值降到 20 左右)
- 當 PID 調亂掉後,你可以嘗試在 BF 裡面還原預設值。但是有時候各廠牌的飛機有特別的設定值,最好到原廠的網站,找到專屬的設定值還原,而不是重置 BF 的預設值。
- 在 BF 下可以保存多組 PID 值,建議其中一組就是原廠設定值不變,而用第二組和第三組來做調整測試,也可以分開設定第二組是賽道值,第3組是 freestyle 值,隨時視飛行需要選擇。
- 此外,很多人會搞混 PID 值與 Rate 值的作用,這是調整兩種不同的屬性。本篇指南主要是針對 PID 對飛行性能的調整,而 Rate 值的調整則是影響翻滾動作的快慢,與飛行性能無關,調整說明可以參考我另外一個設定教學影片:
Betaflight 內 RC rate 與 Super rate 的設定說明
TAGS
- 55 person(s) visited this page until now.