blog:2024-01-16_share_用於提高轉向感覺性能的車和eps邏輯的整體分析
2024-01-16 Share: 用於提高轉向感覺性能的車和EPS邏輯的整體分析
- This document discuss for integral analysis of a vehicle and electric power steering logic for improving steering feel performance


Link
Local Backup
摘要
- 本研究旨在透過分析轉向系統和電動輔助轉向邏輯來研究轉向感覺。首先,根據以往的研究定義了轉向感,並討論了評估方法。其次,透過多體模擬對我們開發的車輛和以其出色轉向感而聞名的競爭對手的車輛進行建模,進行靈敏度分析。然後,我們提出了一種簡單的方法來確定與轉向感覺相關的參數,以實現所需的轉向特性。最後,透過修改電動輔助轉向控制系統,我們在車輛中實現了與所需轉向特性相符的轉向感。
關鍵字:轉向手感;電動輔助轉向系統;逆向工程; 車輛動力學
1, 簡介
- 當車輛沿著名目直線行駛但在高速和低橫向加速度(≤0.2 g)下遇到大半徑彎道時,駕駛者感知到的操縱特性稱為中心轉向感。根據 [ 1 , 2 ],大多數駕駛員在中心轉向區域內操作車輛。因此,一般來說,中心區域的轉向感覺顯著影響駕駛員的日常駕駛體驗。
- 中心駕駛場景中的轉向回饋受到多種因素的影響。在[ 3,4,5 ]中,研究人員分析了轉向機構特性、輔助扭矩非線性、摩擦力和車輛橫向響應的影響。在另一項研究[ 6 ]中,對轉向比、後傾角、轉向系統剛度和輪胎特性等因素進行了額外分析。此外,參考文獻。文獻[ 7,8 ]重點分析了摩擦力和萬向節角度對轉向機構的影響。上述研究證實轉向回饋受到多種因素的影響。這意味著,即使根據這些影響因素的分析對車輛設計進行修改,由於與其他因素的權衡,實現所需的轉向感覺也可能很困難。研究[ 9 ]顯示設計修改可以改善轉向回饋。然而,改變設計通常會比軟體調整產生更大的成本。此外,超出某些開發階段,實施設計變更可能會變得具有挑戰性。因此,要實現所需的轉向感覺,需要在設計階段投入大量成本和時間。
- 為了加快開發過程並降低成本,研究人員進行了各種嘗試來建立可靠的模擬模型來分析轉向特性。在[ 4,8,10 ]中,透過數學建模實現並分析了轉向系統。這種方法實施起來相對簡單,適合參數研究。然而,它無法精確複製真實車輛中的非線性。在[ 11,12 ]中,也考慮了非線性元素。此外,還實現了一種能夠代表車輛橫向特性的車輛模型,可以從整個車輛的角度進行解釋,而不是局限於轉向系統。然而,根據[ 2 ],車輛部件的彈性會影響操控特性。特別是在中心區域,轉向柱、摩擦力和底盤彈性等因素對轉向特性有影響,在模擬環境中考慮這些因素對於建立可靠的模擬模型至關重要。
- 在一項著名的研究[ 13 ]中,作者在多體模擬環境中實現了完整的車輛模型,並進行了模型驗證,以確保車輛和轉向系統模型的可靠性。使用經過驗證的模型,對電動輔助轉向 (EPS) 控制系統進行調整,以實現與目標車輛相同程度的轉向感覺。然而,他們沒有分析目標車輛。這意味著他們無法建議下一階段應修改哪個元件,因為無法透過 EPS 控制器調整來實現所需的轉向感覺。此外,他們沒有提及 EPS 控制器的哪些功能被調整以及如何執行。因此,我們透過分析我們的車輛和競爭對手的車輛之間轉向感覺差異的原因來擴展這些先前的工作,包括上面提到的工作。基於此分析,我們提出了一種設計 EPS 控制器的方法,使其轉向感覺與目標車輛的轉向感覺相符。此外,透過確定影響轉向感覺的主要因素的個別影響,我們提供了各種修改轉向感覺的選項。
- 轉向感是指駕駛在進行轉向動作時所感受到的感覺。它是主觀的並且取決於駕駛員的偏好。在[ 12 ]中,定義了轉向感覺的主觀表達。具體而言,導致訓練有素的駕駛員負面感知「慣性感」的因素仍不清楚。即使工程師找出了這些因素,但如何改進以及改進到什麼程度仍然不清楚。因此,應該對轉向感進行量化和定義,作為制定改進方法和目標的標準。
- 1984年,Kenneth D. Norman透過測量方向盤轉角、轉向扭力和橫向加速度,提出了實驗評估標準[ 14 ],稱為中央操控區域的轉向感覺指數。測量值是透過以 0.2 Hz 的頻率輸入轉向角獲得的,這導致橫向加速度約為 0.2 g。此後,其他研究透過引入細化指標來擴展諾曼的提議,如表1所示。
- 表1 轉向感評估指標及操作方法

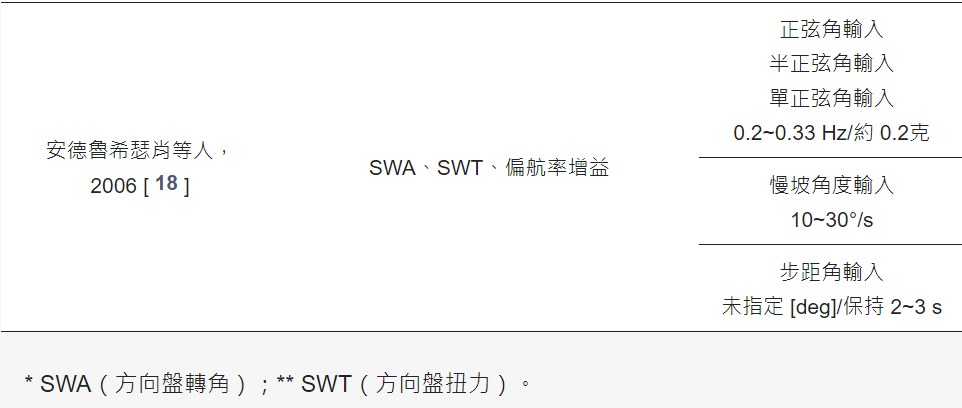
- 在[ 15 ]中,作者旨在利用轉向角和偏航率之間的時間滯後來量化車輛操控性。然而,這種方法在隨後的研究中並沒有被廣泛採用。更常見的是使用橫向加速度來評估車輛反應。在[ 16 ]中,作者透過考慮車輛運動所引起的變化來解釋側傾率對轉向感的影響。這種考慮是為了解釋時間滯後,如論文結論中所提到的,它並沒有表現出強烈的相關性。在[ 17 ]中,介紹了兩種新穎的評估方法。首先是輕彈測試,快速輸入急遽的轉向角度,然後放開方向盤。進行該測試是為了驗證可返回性並評估駕駛員在緊急操作期間感知的扭矩。第二種方法用於評估頻域中的扭矩/角度,以評估車輛響應。在[ 18 ]中,提出了各種轉向輸入模式。雖然先前的許多研究使用正弦轉向輸入得出轉向感覺指數,但作者在這裡使用正弦轉向,但進行了更詳細的細分,以有效地檢查中心轉向特性。此外,還提出了步進轉向,這是繼正弦轉向之後的另一種常用的輸入模式。
- 最後,[ 19 ]進行了相關性分析,從不同製造商和組織定義的指標中得出與駕駛員主觀評價表現出高度相關性的指標。這種相關性分析建立了評估正在開發的車輛的轉向特性是否已根據設計成功實現的標準。最近的研究 [ 20 , 21 ] 利用駕駛員在環仿真,仍然使用 [ 19 ] 和表 1中提到的指標和操作進行評估。在本研究中,基於各種研究的結果,我們在第 2.1 節和第 2.2 節中定義了轉向感覺指數。
- 本研究旨在透過使用多體模擬模型分析我們的車輛和競爭對手的車輛(以其出色的轉向感而聞名)來評估轉向感性能。在模擬環境中建構整車模型可以獨立分析影響轉向感覺的各種因素,這對於全面解釋轉向感覺至關重要。雖然先前的研究著重於分析影響轉向感的各個元素,但我們從組件的角度進行分析,以確定最有效的方向來改變車輛的轉向感。例如,如果無法透過成本最低的方法(例如調整 EPS 控制系統)來獲得所需的轉向感覺,則分析就變得更加重要。然後,有必要考慮開發新的控制系統或使用調整後的現有控制系統進行懸吊設計修改是否會更有效地實現所需的轉向感覺。然而,在僅靠控制系統的影響無法解決問題的情況下,上述選擇最初可能並不合適。因此,在本研究中,我們使用我們的車輛和目標車輛進行了敏感度分析,以確定如何修改因素並在修改單一因素無法達到預期目標時得出最有效的組合。這些好處超過了逆向工程相關的成本。基於上述背景,我們最初的重點是透過主客觀相關性研究建立客觀的轉向感指標。隨後,我們對競爭對手的車輛進行了逆向工程。最後,我們提出了一種設計方法來克服由於摩擦而減少初始扭矩和透過阻尼增加穩定性之間的權衡關係,使我們能夠模擬參考車輛所需的轉向感覺。


2, 辨識轉向感覺因素
2.1. 轉向感性能指數
- 在本研究中,我們利用了先前研究中常用的定義轉向感的指標。所有指標均由駕駛員或轉向機器人在輸入轉向角時測量。首先,以轉向角為輸入時可以觀察到兩個指標,並測量相應的轉向扭矩。如圖 1a所示,0° 轉向角時的轉向扭矩代表了與感知差異以及轉向扭矩相對於轉向角的變化相關的一個重要方面。此外,將 0° 時轉向扭矩的斜率定義為剛度。
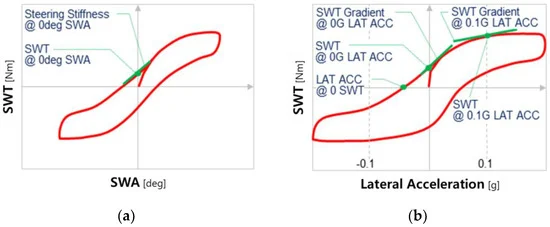
圖1. ( a )方向盤轉角和扭力圖中的轉向手感表現指標;( b )橫向加速度和方向盤扭力圖中的轉向感覺表現指標。- 其次,透過考慮轉向扭矩和橫向加速度之間的關係,可以檢查多個指標,包括轉向返回性、偏心轉向力和扭矩累積線性度,如圖1b所示。在[ 15 ]中,橫向加速度和橫擺速度被定義為代表車輛的反應能力,如圖2所示。然而,大多數研究人員一致考慮橫向加速度,但只有少數研究考慮偏航率。根據[ 19 ],從橫擺率獲得的所有資訊也可以從橫向加速度中獲得。因此,為了驗證模擬模型的可靠性並評估轉向感覺的改善,我們採用了轉向角、轉向扭矩和橫向加速度。
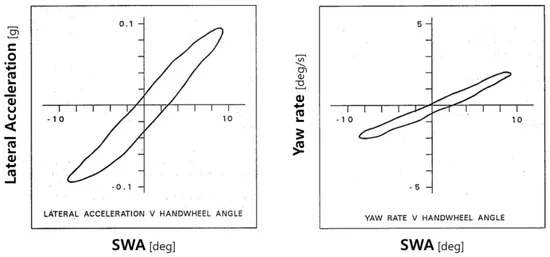
圖 2. 轉向反應性能因素(Farrer [ 15 ],1993)。


2.2. 中心操縱性能測試方法
- 獲得定義的轉向效能指標的測試場景如下。一個場景是搖擺測試,其中涉及在高車速(100 km/h)下應用 0.2 Hz 的正弦轉向角輸入,以產生 0.2 g 的橫向加速度,如圖3所示。在此條件下,車輛經過一個循環後達到穩定狀態,利用特定橫向加速度下的轉向角和轉向扭矩值即可得到定量指標。此測試場景在 ISO 13674-1 [ 22 ]中定義。
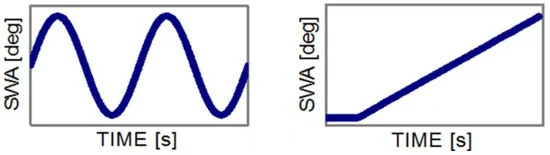
圖 3. 轉向感測試方法(ISO 13674-1、2)。- 另一種情況是過渡測試,其中涉及在高車速(100 km/h)下提供 5°/s 的坡道方向盤輸入。與搖擺測試不同,該測試側重於捕獲轉向早期階段的瞬態響應,並主要揭示穩態響應。ISO 13674-2 [ 23 ]中也定義了此測試場景。
- 在本研究中,我們根據過渡測試結果曲線的拐點將操控分為中心和偏心。在中心部分,當輸入轉向角時,轉向扭矩響應急劇增加,而當輸入轉向扭矩時,轉向角響應由於轉向摩擦而緩慢增加。因此,與偏心部分的響應曲線相比,中心部分的響應曲線是高度非線性的。利用ISO定義的兩個測試場景來驗證上述轉向特性。

2.3. 轉向手感機制分析
- 在本節中,從方向盤到輪胎的自由體圖以三個框架的形式呈現。我們利用它們來分析影響轉向感的因素以及我們的車輛應該設計成什麼方向才能達到目標車輛的轉向感[ 24 , 25 ]。圖 4顯示了從方向盤到小齒輪的部件。
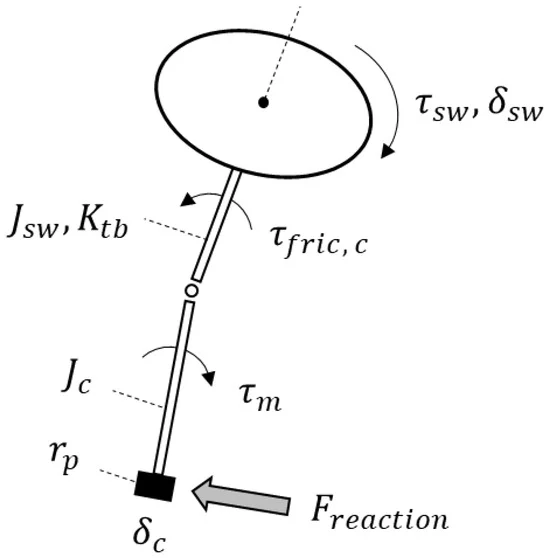
圖 4. 自由體圖:從方向盤到小齒輪。- 上轉向系統的方程式如方程式(1)所示,其中包括駕駛員扭矩輸入𝜏𝑠𝑤, 方向盤慣性𝐽𝑠𝑤, 扭杆剛度𝐾𝑡𝑏,以及方向盤和立柱角度𝛿𝑠𝑤, 𝛿𝑐。假設柱阻尼可以忽略。齒條到小齒輪的反作用力影響小齒輪,如方程式(2)所示。馬達扭矩𝜏𝑚應用在下柱,與 EPS 控制系統配合輔助駕駛者的轉向意圖。𝜏𝑓𝑟 𝑖 𝑐 , 𝑐 , 𝑟𝑝分別是立柱處的摩擦扭矩和小齒輪半徑處的摩擦扭矩。
 (1)
(1) (2)
(2)- 其次,小齒輪與橫拉桿的關係如圖5所示。如式(3)所示,施加在齒條上的反作用力𝐹𝑟𝑒𝑎𝑐𝑡𝑖𝑜𝑛 導致機架移動 𝑥𝑟 對抗摩擦力和慣性𝐹𝑓𝑟 𝑖 𝑐 , 𝑟 從機架和輪子上。
 (3)
(3)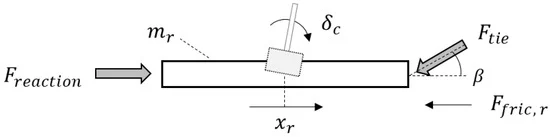
圖 5. 自由體圖:從小齒輪到橫拉桿。- 最後,輪胎的橫拉桿如圖6所示。輪胎中的轉向軸主要由後傾角決定,如圖中紅點所示。橫拉桿的作用點以及車輪旋轉軸與橫拉桿之間的角度以藍點表示,𝛽,分別。方程式(4)表示來自橫拉桿的力𝐹𝑡𝑖𝑒 至輪胎側向力𝐹𝑡。𝐽𝛼, 𝜏𝑓𝑟𝑖𝑐 ,𝑠 分別是車輪的慣性和懸吊的摩擦力。𝑙𝑒 是有效臂長,表示轉向軸與橫拉桿作用點之間的距離。𝑙𝑡 是縱臂,表示轉向軸與輪胎側向力作用點之間的距離。
 (4)
(4)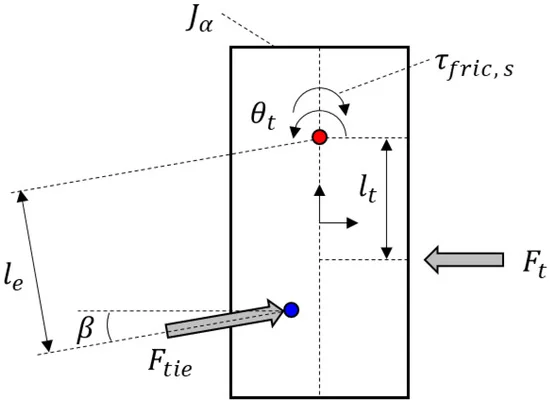
圖 6. 自由體圖:從橫拉桿到輪胎。- 由式(1)~(4)可得式(5)。結合上述三個框架,我們可以推導出駕駛轉向扭矩的構造方程式。
 (5)
(5)- 假設方向盤和轉向柱的角加速度相同,則式(6)成立。
 (6)
(6)- 如式(6)所示,輪胎側向力的線性度顯著影響轉向感。此外,在立柱、齒條和懸吊處設計最小的摩擦有助於產生線性轉向感覺。這項發現與先前的研究結果一致,先前的研究強調了轉向系統各個位置發生的摩擦對操控特性的影響[ 7 ]。特別是在小轉向角的中心操縱情況下,摩擦力的作用不容忽視[ 2 ]。如果無法最大限度地減少摩擦,EPS 控制系統可以補償摩擦元件,以改善中心操控性。此外,方向盤的角加速度項可用於推導瞬態轉向期間的轉向感覺特徵。較小的轉向齒輪比和後傾角軌跡可以增強中心操控的清晰度。具體來說,在中心區域獲得適當轉向回饋的理想解決方案是利用可變轉向齒輪比,如[ 26 ]所示。
- 基於上述結論,我們透過修改底盤和懸吊進行了敏感度分析,分析了關鍵輪胎參數變化的影響。最後,我們開發了一種改進 EPS 邏輯的方法,以實現與目標車輛相似的轉向感覺。









3. 轉向感覺性能預測的模擬環境
3.1. 整合車輛模型的實現
- 我們的目標是透過利用模擬環境來改善車輛的轉向特性,使其與目標車輛的轉向特性相似。為了實現這一目標,可靠的虛擬車輛模型至關重要。如前所述,轉向系統的慣性、阻尼和剛度以及摩擦力和底盤彈性等因素會影響車輛的操縱特性。因此,在模擬環境中應考慮所有這些因素,以獲得如圖7所示的可靠車輛模型。
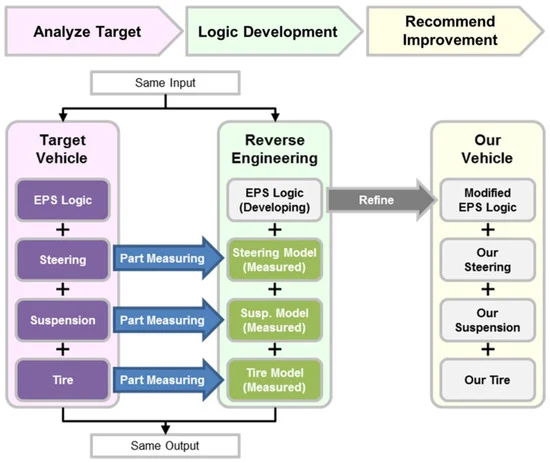
圖 7. 透過實現相同的輸入和輸出對控制邏輯進行逆向工程。- 因此,我們在多體模擬環境中對車輛進行建模,並對單獨的 EPS 系統進行建模以納入轉向系統特性。為了增強轉向特性的可靠性,我們應用如圖8所示的摩擦模型,該模型包括各種組件,例如齒條運行摩擦和阻尼、電機齒輪互鎖摩擦和阻尼、轉向力傳輸構件的剛度特性、和馬達旋轉動力學特性。
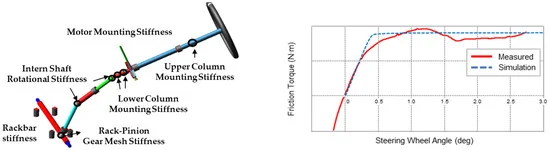
圖8 轉向系統模型及微觀彈性變形特徵摩擦模型。- EPS控制系統具有多種功能來補償慣性和摩擦等因素。基本的 EPS 控制系統包括助力、摩擦補償、慣性補償和阻尼 [ 27 , 28 ]。這些功能有助於減少非線性效應,特別是在中心處理區域,它們會對測試結果產生重大影響。此外,最近的研究重點是發展對幹擾具有穩健性的控制系統[ 29,30,31,32 ]。轉向感覺和車輛操控特性可以根據控制系統的性能進行調整。因此,為了獲得可靠的車輛操控特性,EPS控制系統應整合到模擬環境中,如圖9所示。
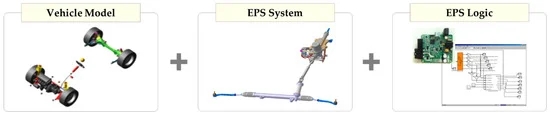
圖 9. 車輛和控制系統整合特性模型。- 最後,為了驗證整合車輛模型,執行了上述兩種測試方法。如圖 10和圖 11所示,不僅可以準確捕捉車輛的轉向反應,還可以準確捕捉車輛的操控特性。因此,整合車輛模型還可以捕捉目標車輛的特徵。在3.2節中,我們描述了模擬環境中目標車輛的建置過程。
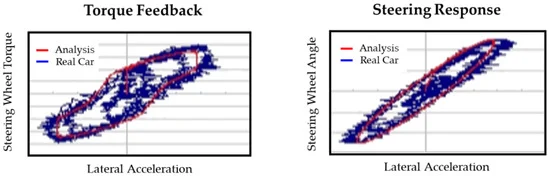
圖 10. 編織測試中轉向評估的可靠性。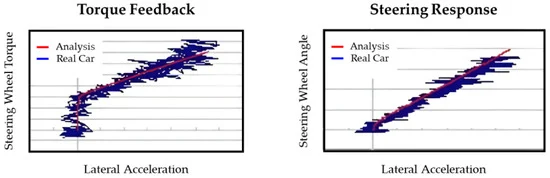
圖 11. 轉換測試時轉向評估的可靠性。





3.2. 目標車輛模型構建
- 在3.1節中,我們描述了我們的車輛在模擬環境中的實現及其可靠性的驗證。使用類似的方法,我們對目標車輛的部件進行了逆向工程,並在模擬環境中實現了它們。
- 在對競爭對手車輛進行建模時,我們透過在測試台上進行測試來獲得數據,透過與我們車輛類似的建模過程來融合底盤彈性、摩擦力和轉向系統的特性。為了驗證實施結果,將實際競爭對手車輛的橫向響應與模擬車輛的橫向響應進行了比較,如圖12所示。此驗證是針對車輛模型進行的,但不包括 EPS 控制系統。3.3 節中的轉向感覺是根據獲得的可靠競爭對手車輛模型實現的。
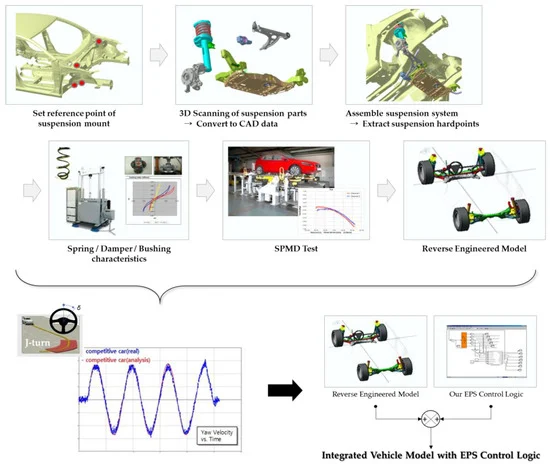
圖 12. 透過儲備工程和可靠性結果進行競爭對手車輛建模。

3.3. 目標競品車輛EPS控制邏輯特徵提取
- 與底盤不同,目標車輛中的 EPS 邏輯不能作為單獨的組件直接測量。因此,我們根據車輛的EPS控制系統進行逆向工程,提取邏輯因素。如預期的那樣,當將我們車輛的 EPS 控制系統應用於目標車輛時,觀察到轉向感覺性能的差異。因此,對控制系統進行了微調,以達到與目標車輛的實車資料相同的特性。然而,僅僅調整EPS控制系統並不能達到預期的效果。因此,我們針對阻尼功能對EPS控制系統進行了修改。
- 關於瞬態轉向特性,與測量數據不同,由摩擦引起的初始轉向扭矩梯度沒有被適當地抵消,如圖13b所示。這種差異主要歸因於摩擦力。為了準確地實現競爭對手車輛的轉向特性,應增強摩擦補償。當由於摩擦而在初始轉向階段需要顯著的轉向扭矩時,一種方法是透過對扭矩感測器訊號應用高通濾波器來增加高頻分量的比例增益,如圖中的藍線所示。圖13 b .然而,太大的高頻輔助會扭曲正弦轉向輸入的扭矩響應,如圖14a所示。這導致阻尼特性過度降低且摩擦感減弱。此外,在這種情況下,方向盤變得更容易受到干擾並失去穩定性,如圖14b所示。為了獲得穩定性和阻尼感,應增加阻尼增益。然而,增加阻尼也會抵消擴大的高頻輔助。因此,這些因素之間存在顯著的權衡,使得設定邏輯因素以匹配使用高頻輔助的競爭對手車輛的轉向感覺特性具有挑戰性。
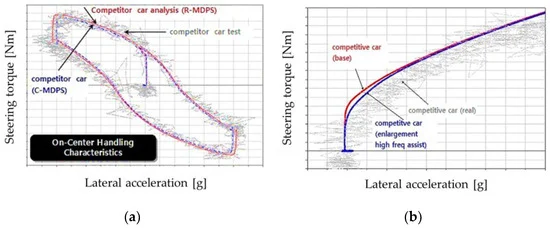
圖 13. ( a ) 編織測試比較;( b ) 轉換測試的比較。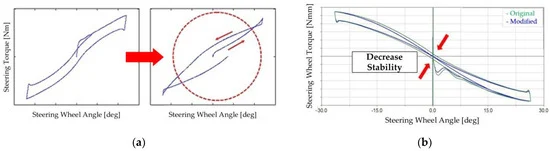
圖 14. ( a ) 轉向扭力路徑扭曲;( b ) 高頻輔助下穩定性降低。- 為了解決這個問題,我們建議增加具有可變阻尼增益的高頻輔助。首先,增加高頻輔助增益以改善過渡測試中的偏移。然後,為了解決扭矩路徑扭曲問題,我們修改了可以透過轉向角速度設定的阻尼增益。詳細參數設定如下:
- 如圖15所示,透過將轉向角速度分為三段來設定阻尼參數。與無論轉向角速度如何只定義一種增益的傳統規格不同,增加高頻輔助增益不會導致先前定義的問題。在設定每個部分的配置之前,增加了第2部分的阻尼增益(0.1-0.3轉/秒),以改善因高頻輔助增益增加而降低的阻尼感和路線扭曲。然後實施了以下特定於部分的配置。
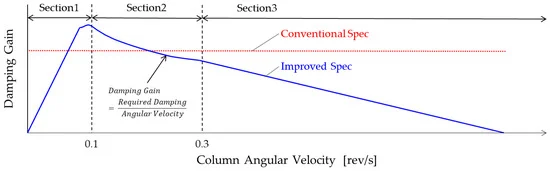
圖 15. 相對於角速度的阻尼增益設定概念。- 第 1 部分:設定初始轉向輸入和小角度返回能力的最小阻力等級 (0–0.1 rev/s)。
- 當設定阻尼增益以滿足阻尼感和穩定性時,駕駛員轉向的阻力增加,導致對快速轉向(例如步進轉向)的初始響應延遲。然而,應用所提出的方法,初始轉向階段所需的扭矩減少,導致輪胎轉向角增加,如圖16a所示。此外,在不干涉情況下觀察到阻尼對可返回性的影響,並且可以透過所提出的方法確認改進的可返回性,如圖16b所示。

圖 16. ( a ) 初始反應的改進;( b ) 轉向返回性的改善。
- 第 2 部分:在正弦轉向 (0.1–0.3 rev/s) 中設定獨立於角速度的一致阻尼感。
- 阻尼增益設定為所需阻尼除以轉向角速度,以實現與輸入角速度無關的阻尼感覺。所需的阻尼被設定為滿足路線扭曲問題和穩定性,如前所述,從而抵消高頻輔助增加的影響,如圖17所示。

圖 17. 不同轉向角速度下的轉向性能。
- 第 3 部分:設定緊急轉向和可返回性的最小阻力(~0.3 rev/s)。
- 透過減少其餘部分的增益,我們增強了轉向響應和返回能力,如圖18的藍色軌跡所示。因此,我們成功地在各種情況下實現了所需的轉向性能。

圖18 高速操縱時轉向回正能力比較。






4. 改善轉向感的敏感度分析
4.1. 競品車型與我司車型差異分析
- 在獲得預測競爭對手車輛性能的模擬模型後,可以針對我們的車輛與競爭對手的差異進行敏感度分析,分析影響轉向感覺性能的因素。我們分析了兩輛車在轉向系統、懸吊和輪胎方面的差異所產生的影響(圖 19)。

圖19 車輛特徵因素影響分析。- 作為參考,由於轉向不足特性的變化,橫向加速度水平在圖 20中顯得不同,這是相同轉向角輸入的結果。

圖 20. 兩輛車之間比較因素的影響分析。- 案例研究模型 1:轉向
- 將我們車輛的轉向系統應用於目標車輛(圖 20,紅線與黑線)顯示,由於過度的輔助,轉向扭力整體下降。此外,在偏離中心的區域觀察到坡度減小,這無法向駕駛員提供適當的回饋。
- 案例研究模型 2:暫停
- 當將懸吊(圖20,紅線與綠線)和我們的底盤(包括轉向系統和懸吊)應用到目標車輛(圖20,紅線與紅虛線)時,方向盤扭矩在關閉- 中心區域縮小。這是因為施法者軌跡 (𝑙𝑡 我們開發車輛的圖6)較小,可以透過減少轉向系統的輔助扭矩來進行一定程度的補償。此外,經過中心部分時,方向盤扭力的滯後寬度增加。這是由於懸吊的摩擦力和阻尼增加所致,透過改變轉向系統的阻尼邏輯來實現一定程度的補償。
- 案例研究模型 3:輪胎
- 將我們車輛的輪胎應用於目標車輛(圖 20,紅線與黃線)產生幾乎相同的結果。這是因為輪胎側偏剛度是決定轉向角輸入的橫向加速度響應特性的因素,因此對橫向加速度的方向盤扭力特性影響很小。因此,為了確定輪胎側偏剛度變化的影響,必須考慮所涉及的複雜性來分析根據轉向角輸入的橫向加速度響應以及由此產生的方向盤扭矩響應,這將在下一節中單獨介紹。


4.2. 輪胎設計參數的影響分析
- 輪胎特性很重要,因為可以對其進行修改以提高車輛的性能而不改變懸吊。因此,我們對輪胎的主要參數進行了敏感度分析。首先,如圖 21a的橫向加速度與轉向角圖所示,輪胎側偏剛度的增加同時導致轉向靈敏度和最大橫向加速度的增加。此外,它還減少了滯後曲線的寬度,改善了初始響應特性並減少了橫向加速滯後時間。其次,隨著橫向加速滯後時間的減少,如圖 21b所示的累積特性增加,且中心部分的方向盤扭力損失減少。最後,隨著氣動拖曳的加劇,以及在返回性效應下的累積特性,中心方向盤扭力損失和橫向加速滯後增加。
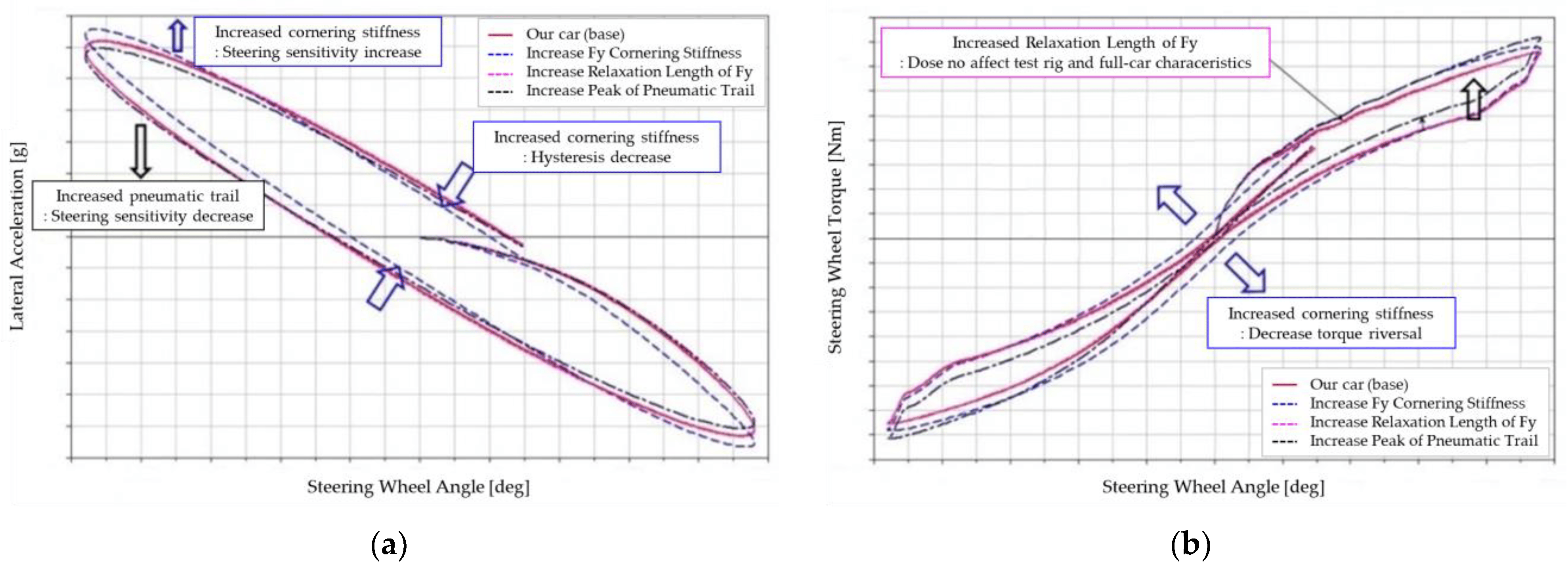
圖 21. ( a ) 根據輪胎特性的正弦靈敏度;( b ) 根據輪胎特性形成正弦扭矩。- 隨著氣動軌跡的增強,如圖22所示,由於恢復效應(稱為對準力矩),累積特性也會增強。這與增加後傾角的原理是一樣的。輪胎側偏剛度決定了轉向角輸入下的橫向加速度響應特性,因此對橫向加速度下的方向盤扭力特性影響不大。
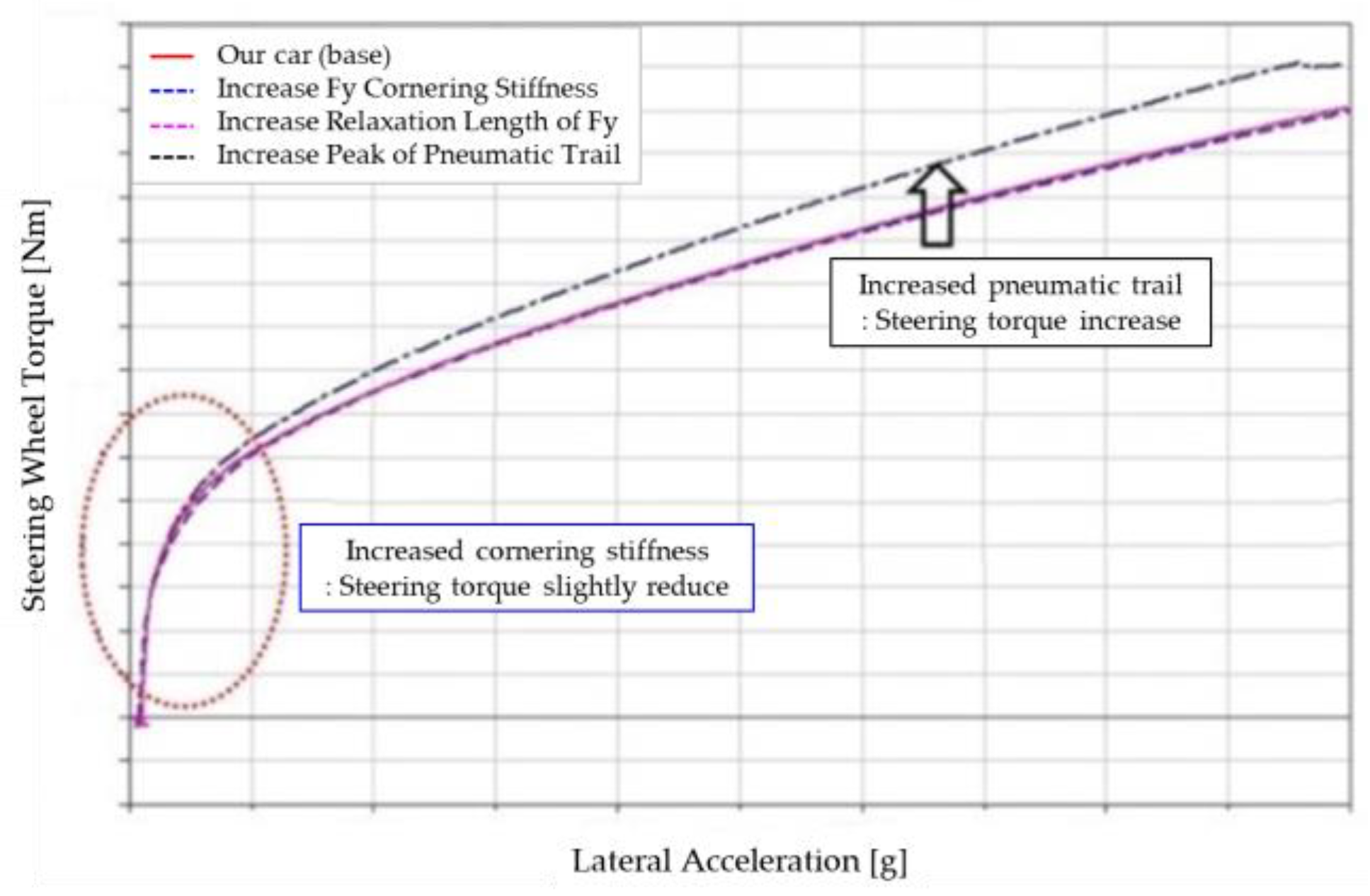
圖 22. 根據輪胎特性的過渡特性。


4.3. 透過邏輯調優實現轉向手感性能提升
- 如果僅透過改變 EPS 邏輯來改善轉向感覺性能,則應該以最小的成本來實現,同時對性能的其他方面的影響最小。實現競爭對手車輛轉向感覺的EPS邏輯調整方法與3.3節方法相同。在本節中,根據前面描述的方法和我們調整車輛的測試結果,我們展示了我們提出的改善轉向感的方法的結果。
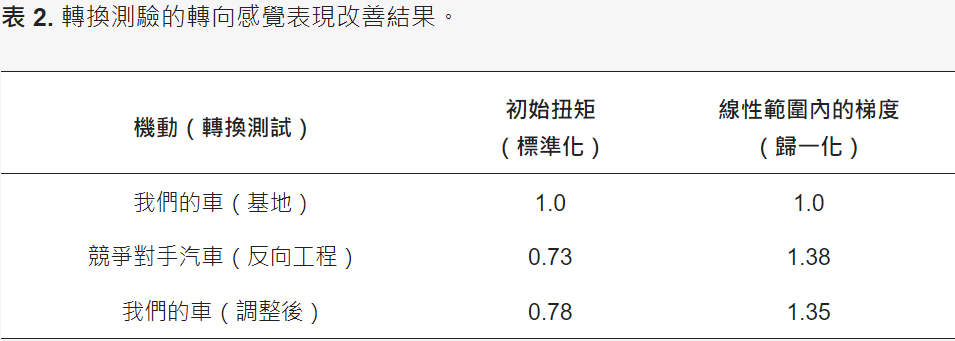
- 最初,如轉換測試結果所示(圖 23,表 2),我們透過對扭矩感測器訊號進行微分,增加了高頻增益以降低初始扭矩,這在非常低的橫向加速度下得到了證明。我們調整後的汽車表現出初始扭力的 78%,接近競爭對手汽車的扭力 (73%)。此外,競爭對手車的坡度比我們車子的坡度高 38%。我們調整後的汽車實現了 35% 的梯度增強,與競爭對手的汽車非常接近。本質上,我們解決了汽車轉向扭矩隨著橫向加速度增加而線性增加的問題。同時,我們降低了初始扭矩,使駕駛員感覺到的摩擦更小。
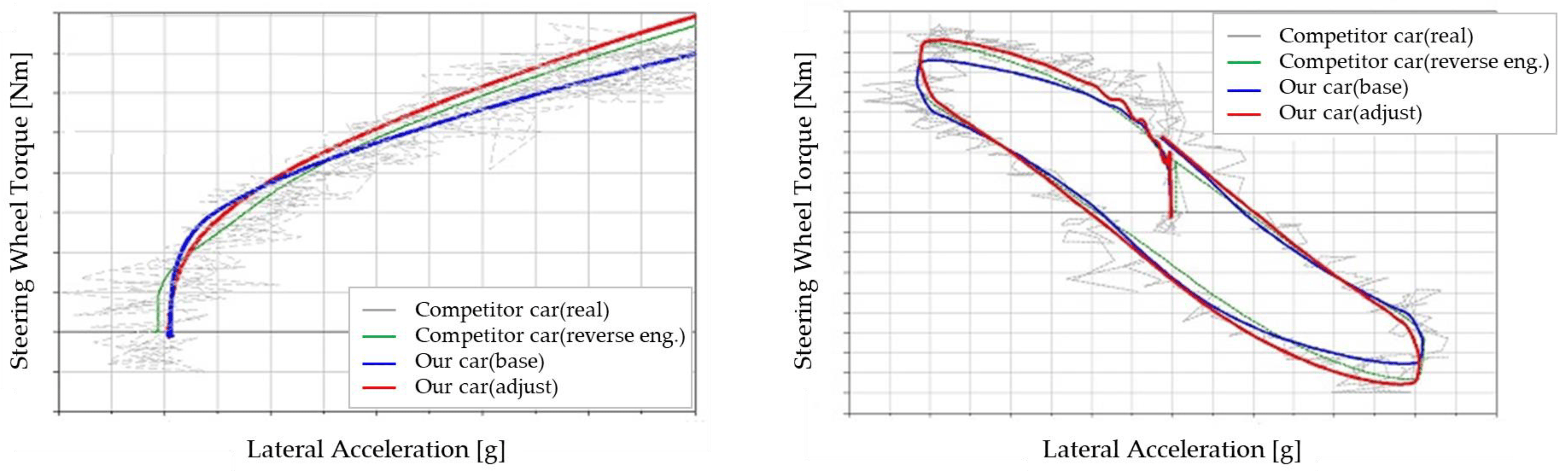
圖 23. 透過邏輯調整實現競爭對手車輛的正弦特性。- 表 2. 轉換測驗的轉向感覺表現改善結果。
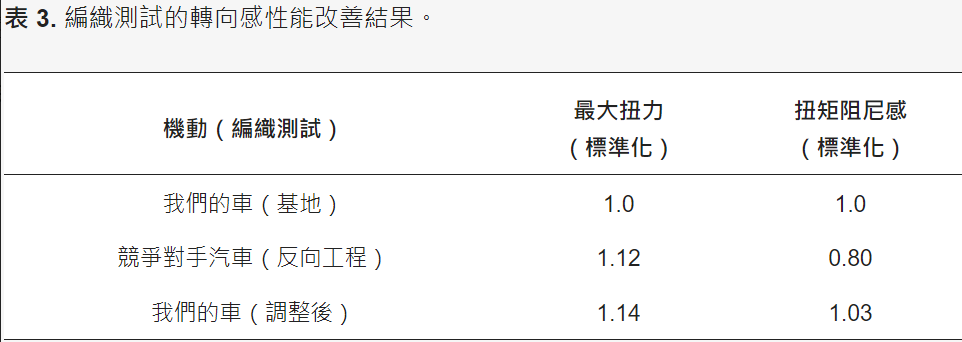
- 其次,從正弦轉向圖和表3可以看出,我們減少了過多的助力,以增加偏心區域的轉向扭矩。我們將汽車的峰值扭力提高了 14%,與競爭對手汽車的峰值扭力保持一致。而且,扭力阻尼感,即0g時方向盤扭力的距離,保持不變。這意味著我們設法透過應用可變阻尼增益來保持穩定性。結果,同時實現了轉向初期摩擦感的降低和反覆轉向時阻尼感的增加,這兩者俱有權衡關係。
- 表 3. 編織測試的轉向感性能改善結果。



5。結論
- 駕駛者感知到的操縱特性稱為正中轉向感,它是由轉向系統、EPS控制系統的非線性特性以及輪胎的側向力產生特性決定的。為了改善這一點,我們分析了轉向機構,以確定影響轉向感覺的關鍵因素。然後在多體模擬環境中實現具有良好轉向感的目標車輛。由此,我們進行了敏感度分析,透過系統化的方法確定影響轉向感的重要因素。隨後,我們根據機理分析中確定的關鍵因素的變化,探索了改善車輛轉向手感的方法。
- 我們確認多體模擬環境可以捕捉車輛的轉向感覺。在此基礎上,我們透過對沒有EPS控制邏輯的目標車輛的轉向系統、底盤和輪胎進行逆向工程,建構了可靠的車輛模型。為了實現目標車輛的轉向感覺,我們將 EPS 邏輯分為三個部分來細化其阻尼係數。因此,我們能夠透過將我們車輛的組件應用於目標車輛來進行敏感度分析。最後,為了克服我們的車輛和目標車輛之間的差異,我們以盡可能低的成本修改了 EPS 邏輯。結果,我們能夠實現與目標車輛相似的轉向特性。
- 這項研究讓我們深入了解了 EPS 邏輯的設計,這對於實現所需的轉向感覺至關重要。在獲得這些見解後,我們將這些知識應用到我們的生產車輛中。結果,我們的量產車展現了理想的轉向感。此外,當我們考慮主觀和客觀評估之間的相關性時,主觀測試人員對轉向感覺提供了積極的回饋。測試人員的回饋增強了我們研究的有效性和可靠性。
- 在未來的工作中,我們將在類似於單獨建模的轉向系統中整合執行器(例如煞車系統)。整合模擬模型將有助於分析轉向系統以外的系統幹預期間的轉向感覺。此外,我們的目標是開發閉環 EPS 控制系統,以防止因其他系統的干擾而導致轉向感下降。透過該系統,我們預計會減少調諧時間,提高抗擾性,並保證穩健的性能。
TAGS
- 35 person(s) visited this page until now.
blog/2024-01-16_share_用於提高轉向感覺性能的車和eps邏輯的整體分析.txt · Last modified: 2024/01/16 10:20 (external edit)
Page Tools
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Share Alike 4.0 International
